วิศวกรรมที่ MIT ใช้เทคนิคการพิมพ์แบบใหม่พัฒนาโครงสร้างทางชีวการแพทย์เป็นวัสดุลักษณะอ่อนที่พิมพ์ออกมาเป็น 3 มิติ และสามารถควบคุมจากระยะไกลให้เคลื่อนไหวได้ด้วยคลื่นแม่เหล็ก เหมือนกับหุ่นกระบอกที่ไม่มีสายเชิด
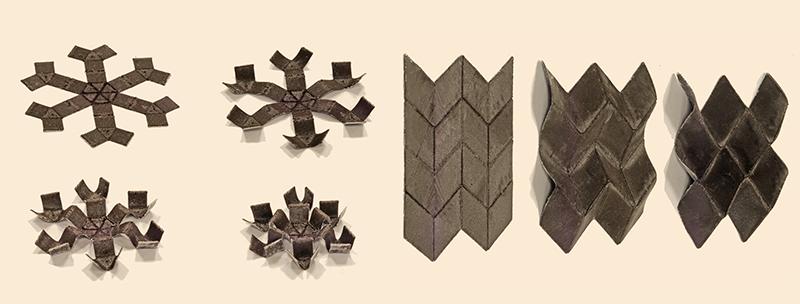
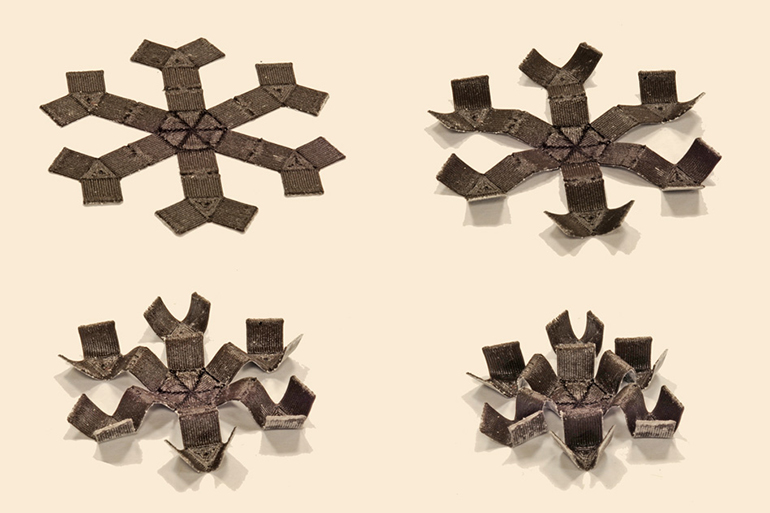
โครงสร้างแบบหุ่นกระบอกที่สามารถควบคุมได้ด้วยคลื่นแม่เหล็กนี้ ประกอบไปด้วยวงแหวนลักษณะเกลี้ยงที่ย่นได้ สายท่อยาวที่บีบปิดได้ มีแผ่นชีทที่พับตัวเอง และแขนจับที่เหมือนแมงมุม ซึ่งสามารถคลาน ม้วนกลิ้ง กระโดด และหดเข้าพร้อมกันได้รวดเร็วพอที่จะจับลูกบอลที่กลิ้งผ่านมาได้ นักวิทยาศาสตร์สามารถกำกับควบคุมโครงสร้างนี้ให้ห่อตัวเองรอบ ๆ ยาเม็ดเล็ก ๆ และพายาข้ามโต๊ะไปได้
คณะผู้วิจัยได้ประดิษฐ์แต่ละโครงสร้างจากหมึกแบบใหม่ที่สามารถพิมพ์เป็น 3 มิติได้ โดยกรอกใส่หมึกเข้าไปในอนุภาคแม่เหล็กขนาดเล็ก และติดแม่เหล็กไฟฟ้าไว้รอบ ๆ หัวฉีดของพรินเตอร์ 3 มิติ ซึ่งทำให้อนุภาคแม่เหล็กสวิงไปในทิศทางเดียวในขณะที่ส่งหมึกผ่านหัวฉีด
ด้วยการควบคุมทิศทางแม่เหล็กของแต่ละส่วนในโครงสร้างนี้ นักวิจัยสามารถผลิตโครงสร้างและอุปกรณ์ที่สามารถเปลี่ยนเป็นรูปแบบที่ซับซ้อนได้เกือบจะในทันที และแม้แต่ให้เคลื่อนที่ไปรอบ ๆ ขณะที่ส่วนต่าง ๆ ตอบสนองต่อสนามแม่เหล็กภายนอก
Xuanhe Zhao ศาสตราจารย์ Noyce Career Development ที่ Department of Mechanical Engineering และ Department of Civil and Environmental Engineering แห่ง MIT กล่าวว่า อาจจะใช้เทคนิคของกลุ่มนักวิทยาศาสตร์นี้เพื่อประดิษฐ์อุปกรณ์ชีวการแพทย์ที่ควบคุมด้วยแม่เหล็กได้
“เราคิดว่าในชีวการแพทย์ เทคนิคนี้จะพบวิธีนำไปใช้ที่เป็นไปได้ในอนาคต” Prof. Zhao กล่าวและว่า “ยกตัวอย่าง เราสามารถใส่โครงสร้างนี้ไว้รอบ ๆ หลอดเลือดเพื่อควบคุมการปั๊มเลือด หรือใช้แม่เหล็กเพื่อนำทางอุปกรณ์ผ่านทางเดินอาหารเพื่อสร้างภาพ สกัดตัวอย่างเนื้อเยื่อ เคลียร์สิ่งกีดขวางหรือส่งยาบางอย่างไปในตำแหน่งที่เจาะจงโดยเฉพาะ คุณสามารถออกแบบ จำลอง และแค่พิมพ์ออกมาเพื่อให้ทำหน้าที่ต่าง ๆ ได้”
Prof. Zhao กับคณะผู้ร่วมงานได้เผยแพร่ผลการศึกษาในวารสาร Nature ผู้ร่วมเขียนรายงาน ได้แก่
Yoonho Kim, Hyunwoo Yuk และ Ruike Zhao แห่ง MIT และ Shawn Chester จาก New Jersey Institute of Technology
โครงสร้างที่กระตุ้นด้วยแม่เหล็กของคณะทำงานชุดนี้จัดอยู่ในประเภทอุปกรณ์ที่มีลักษณะอ่อนตัวซึ่งอาศัยการกระตุ้น กล่าวคือ เป็นวัสดุที่ยืดหยุ่น สามารถขึ้นรูปได้ โดยออกแบบให้เปลี่ยนแปลงรูปทรง หรือเคลื่อนไปรอบ ๆ ผ่านวิธีการต่าง ๆ ทางเครื่องกล
ตัวอย่างเช่น อุปกรณ์ hydrogel จะขยายออก เมื่ออุณหภูมิหรือ pH เกิดเปลี่ยนแปลง; โพลิเมอร์ที่จดจำรูปร่างได้ (shape-memory polymers) กับ liquid crystal elastomers จะเสียรูปร่างด้วยแรงกระตุ้นที่มากเพียงพอ เช่น ความร้อนหรือแสงสว่าง; อุปกรณ์นิวเเมติกและไฮดรอลิกจะถูกกระตุ้นด้วยอากาศหรือน้ำที่ปั๊มเข้าไป; และวัสดุ dielectric elastomers จะยืดออกภายใต้แรงดันไฟฟ้า
แต่ hydrogels, shape-memory polymers และ liquid crystal elastomers ตอบสนองได้ช้าและเปลี่ยนรูปร่างโดยใช้เวลาตั้งแต่หลายนาทีถึงหลายชั่วโมง อุปกรณ์ที่อาศัยอากาศหรือน้ำผลักดันต้องมีท่อที่ต่อเชื่อมอุปกรณ์กับปั๊ม ซึ่งจะทำให้อุปกรณ์ด้อยประสิทธิภาพลงสำหรับการควบคุมใช้งานระยะไกล วัสดุ dielectric elastomers ต้องการแรงดันไฟฟ้าสูง โดยปกติมากกว่า 1 พันโวลต์
“ไม่มีคู่แข่งที่สุดยอดเทียบได้กับหุ่นยนต์ที่อ่อนตัวซึ่งสามารถทำงานในพื้นที่ปิดได้ อย่างเช่น ในร่างกายของมนุษย์ ซึ่งเป็นที่ที่เราต้องการให้ทำงานบางอย่างโดยไม่มีพันธนาการ” Kim กล่าวและว่า “นั่นคือเหตุผลว่าทำไมเราถึงคิดว่า มีความหวังที่เป็นไปได้อย่างมากในอนาคตกับความคิดของการกระตุ้นด้วยแม่เหล็ก เนื่องจากมันมีความรวดเร็ว มีพลัง ไม่เป็นอันตรายกับร่างกาย และสามารถควบคุมในระยะไกลได้”
นักวิจัยกลุ่มอื่น ๆ ประดิษฐ์วัสดุที่กระตุ้นด้วยแม่เหล็กได้ แม้การเคลื่อนไหวที่ทำได้จะยังค่อนข้างง่ายก็ตาม ส่วนใหญ่นักวิจัยจะผสมสารละลายโพลิเมอร์ด้วยเม็ดแม่เหล็ก (magnetic beads) และเทสารละลายเข้าไปในพิมพ์ เมื่อวัสดุเข้ากันแล้ว จะใช้สนามแม่เหล็กทำให้เป็นแม่เหล็กอย่างสม่ำเสมอ ก่อนจะนำโครงสร้างวัสดุออกจากแม่พิมพ์
“นักวิจัยได้ผลิตเฉพาะโครงสร้างที่ยืด หด หรือโค้งงอได้” Yuk กล่าวและว่า “แต่ปัญหา คือ คุณจะออกแบบโครงสร้างหรือหุ่นยนต์อย่างไรให้สามารถทำงานที่ซับซ้อนมากยิ่งขึ้น”
แทนที่จะทำโครงสร้างที่มีอนุภาคแม่เหล็กที่เหมือนกัน มีทิศทางเป็นหนึ่งเดียวกัน คณะทำงานได้หาหนทางต่าง ๆ ในการสร้าง “โดเมน” แม่เหล็ก กล่าวคือ แต่ละส่วนของโครงสร้างจะมีทิศทางของอนุภาคแม่เหล็กแตกต่างเฉพาะตัว เมื่อสัมผัสกับสนามแม่เหล็กภายนอก แต่ละส่วนควรจะเคลื่อนตัวด้วยวิถีที่แตกต่างกัน ขึ้นอยู่กับทิศทางที่แต่ละอนุภาคเคลื่อนที่เพื่อตอบสนองต่อสนามแม่เหล็ก ด้วยวิธีนี้กลุ่มผู้วิจัยคาดว่า โครงสร้างจะมีการแสดงออกและความเคลื่อนไหวที่ซับซ้อนมากขึ้น
ด้วยการใช้แพลทฟอร์ม 3 มิติ รุ่นใหม่ คณะผู้วิจัยสามารถพิมพ์ส่วนต่าง ๆ หรือ โดเมน ของโครงสร้าง และปรับทิศทางของอนุภาคแม่เหล็กในโดเมนนั้น โดยเปลี่ยนแปลงเส้นทางของแม่เหล็กไฟฟ้าที่อยู่รอบหัวฉีดของพรินเตอร์ขณะพิมพ์โดเมน
คณะทำงานยังพัฒนาตัวแบบทางกายภาพ ซึ่งช่วยพยากรณ์ว่า โครงสร้างที่พิมพ์ออกมานั้นจะเสียรูปอย่างไรในระหว่างอยู่ในสนามแม่เหล็ก
ด้วยความยืดหยุ่นของวัสดุที่พิมพ์ออกมา, รูปแบบของโดเมนที่อยู่ในโครงสร้าง และวิธีการปล่อยสนามแม่เหล็กจากภายนอก ตัวแบบจะสามารถพยากรณ์ทิศทางที่โครงสร้างทั้งหมดจะเสียรูปหรือเคลื่อนที่ไป
Ruike พบว่า การพยากรณ์ของตัวแบบสอดคล้องอย่างมากกับการทดลองปฏิบัติการที่คณะทำงานได้ดำเนินการ โดยใช้โครงสร้างจำนวนมากที่พิมพ์ออกมาแตกต่างกัน
นอกจากแหวนที่เคลื่อนไหวเป็นคลื่น, ท่อที่บีบตัวเองได้ และแขนจับที่เหมือนแมงมุมแล้ว คณะทำงานได้พิมพ์โครงสร้างอื่น ๆ ที่ซับซ้อนออกมาด้วย เช่น ชุดโครงสร้าง “auxetic” ซึ่งหดตัวหรือขยายตัวได้อย่างรวดเร็วไปตามทิศทาง 2 ด้าน
Prof. Zhao และคณะผู้ร่วมงานยังพิมพ์วงแหวนที่ล้อมด้วยวงจรไฟฟ้าและหลอดไฟ LED สีแดงและเขียว วงแหวนจะเสียรูปและเปิดไฟสีแดงหรือสีเขียวตามที่กำหนดโปรแกรมไว้ โดยขึ้นอยู่กับทิศทางของสนามแม่เหล็กภายนอก
“เราได้พัฒนาแพลทฟอร์มการพิมพ์และตัวแบบพยากรณ์สำหรับให้ผู้อื่นใช้ได้ ทุกคนสามารถออกแบบโครงสร้างของตนและรูปแบบของโดเมน ทำให้โครงสร้างสอดคล้องกับตัวแบบ และพิมพ์ออกมาเพื่อกระตุ้นการทำหน้าที่ต่าง ๆ” Prof. Zhao กล่าวว่า
“ด้วยการโปรแกรมข้อมูลที่ซับซ้อนของโครงสร้าง โดเมน และสนามแม่เหล็ก เราสามารถพิมพ์เครื่องกลที่มีสติปัญญาอย่างเช่นหุ่นยนต์ได้”
Jerry Qi ศาสตราจารย์สาขาวิศวกรรมเครื่องกลที่ Georgia Tech กล่าวว่า การออกแบบของกลุ่มผู้วิจัยทำให้เกิดหุ่นยนต์ได้หลากหลาย เป็นหุ่นที่มีความอ่อนตัว สามารถควบคุมได้จากระยะไกล และรวดเร็ว โดยเฉพาะในสาขาชีวการแพทย์
“ผลงานชิ้นนี้เป็นการค้นพบที่ใหม่มาก” Prof. Qi ซึ่งไม่ได้มีส่วนร่วมในการวิจัย กล่าวและว่า “เราสามารถใช้หุ่นยนต์ที่อ่อนตัวภายในร่างกายมนุษย์หรือที่ที่ไม่สามารถเข้าถึงได้ง่าย ด้วยเทคโนโลยีที่รายงานในเอกสารนี้ เราสามารถใช้สนามแม่เหล็กภายนอกร่างกายมนุษย์ได้โดยไม่ต้องใช้สายลวดใด ๆ
เนื่องจากความเร็วในการตอบสนอง หุ่นยนต์ที่อ่อนตัวสามารถทำงานให้เสร็จในเวลาอันสั้น ซึ่งมีความสำคัญต่อการนำไปใช้ในภาคปฏิบัติ”
การวิจัยนี้ได้รับการสนับสนุนบางส่วนจาก National Science Foundation, Office of Naval Research, และ Institute for Soldier Nanotechnologies แห่ง MIT




.jpg)